Сравнение подходов сегментации и детекции объектов
Задача¶
- Проанализировать окружающую обстановку
Критерии выбора метода¶
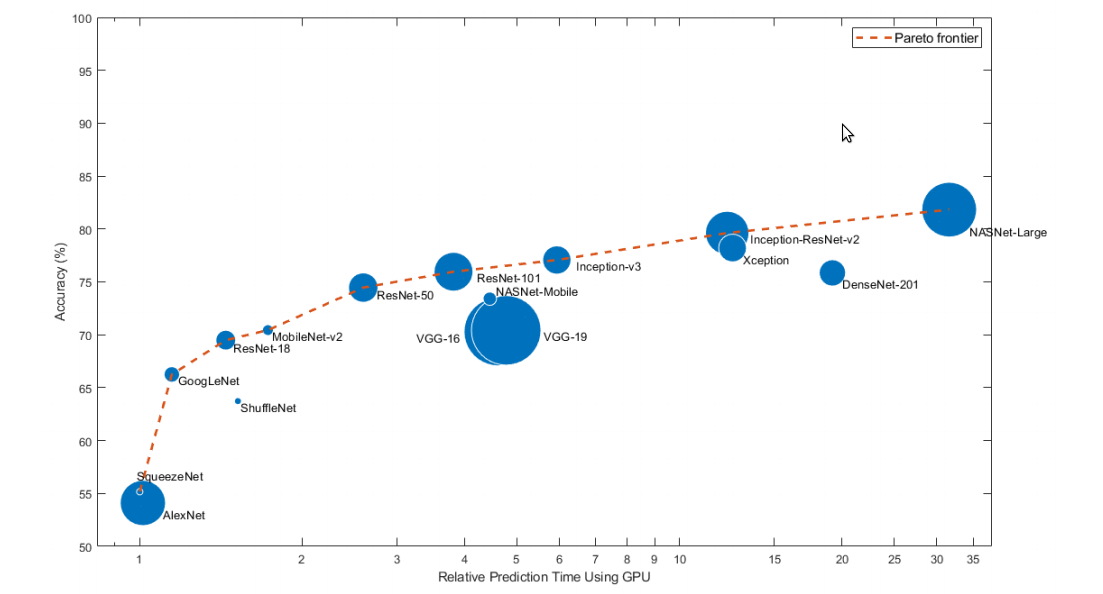
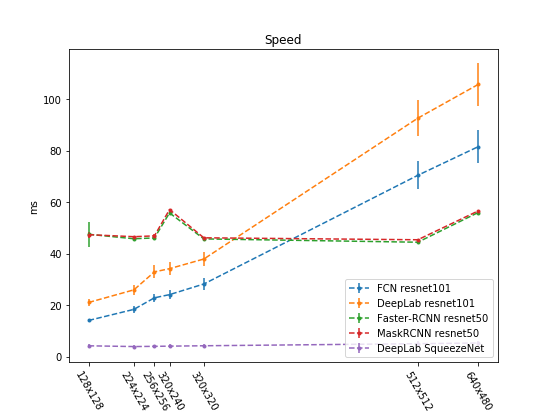
Скорость выполнения¶
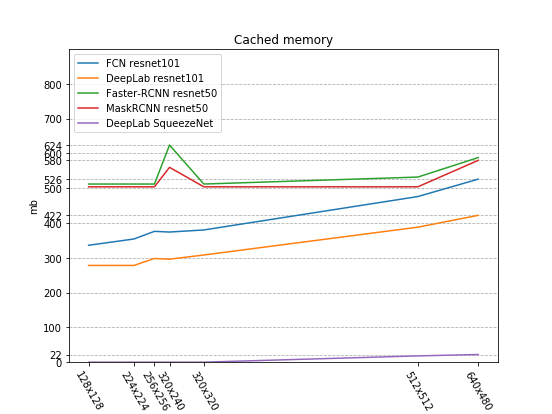
Занимаемая память¶
Точность¶
Полезность данных¶
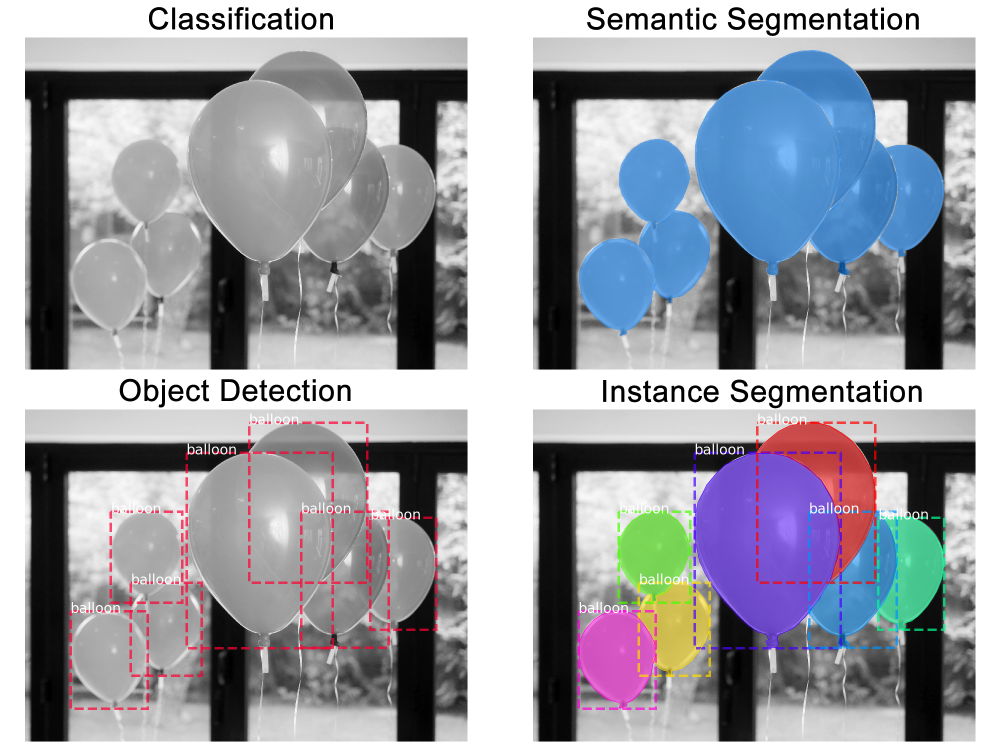
Что такое детекция объектов, семантическая сегментация и сегментация объектов¶
- Классификация: в кадре находится шар
- Семантическая сегментация: в кадре находится шар или шары, вот их маска.
- Детекция объектов: в кадре находятся 7 шаров, вот зоны, где они располагаются.
- Объектная сегментация: В кадре находится 7 шаров, вот маски, где они располагаются
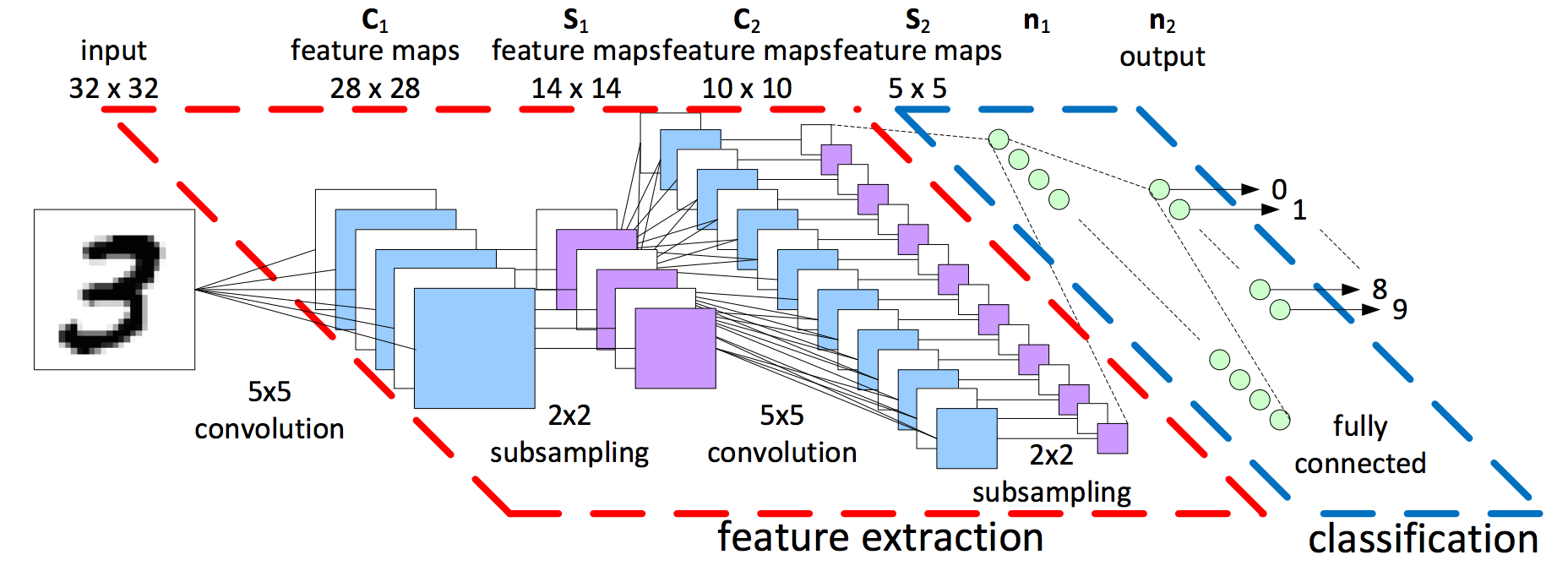
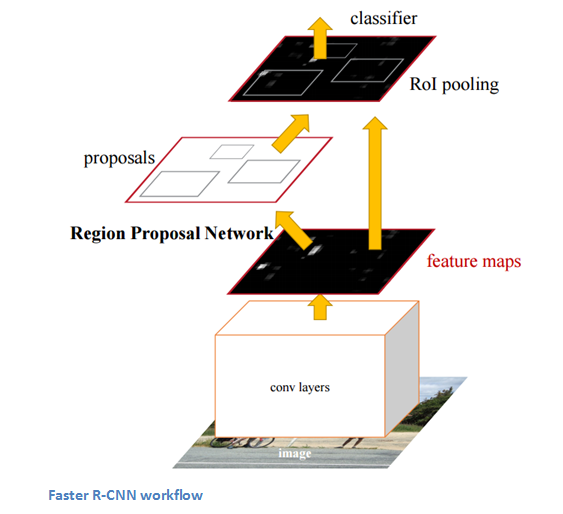
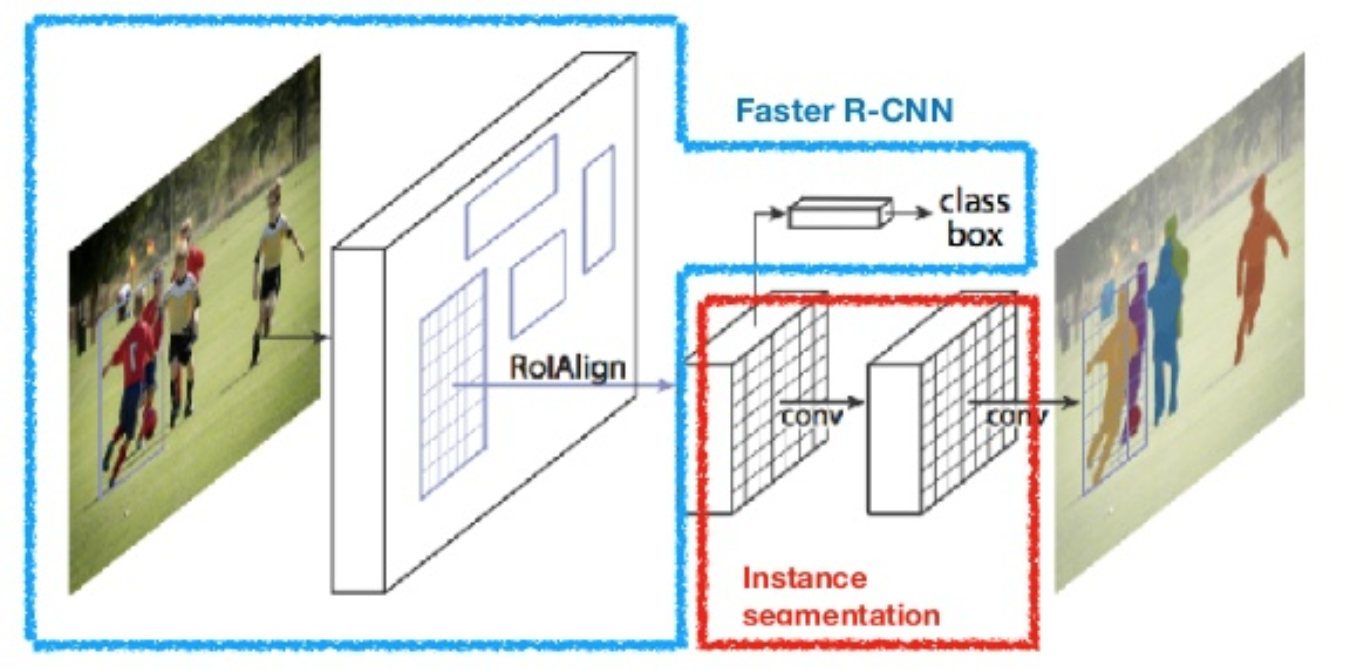
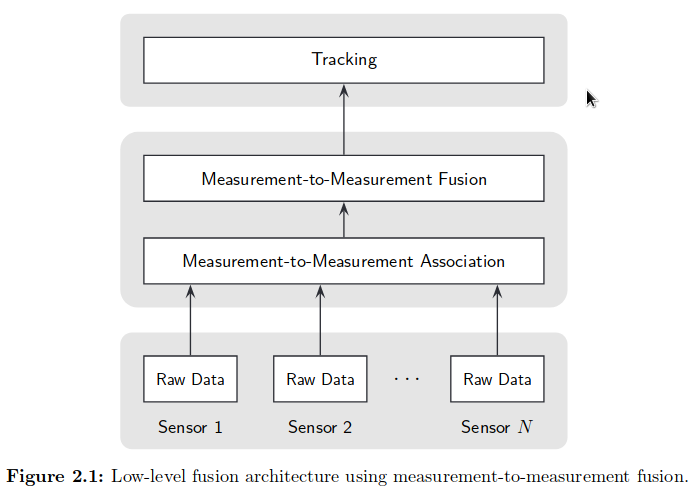
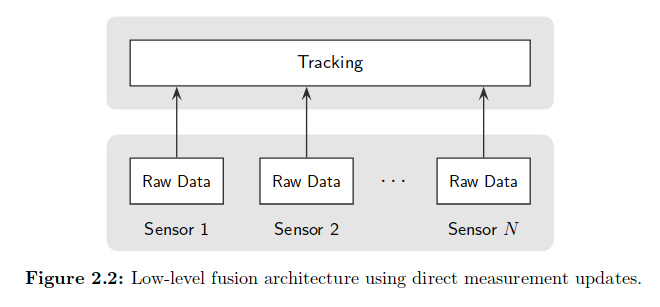
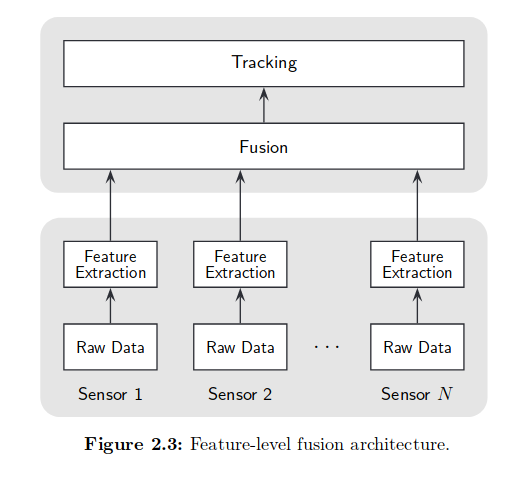
Схематические архитектуры¶
Классификатор¶
#¶
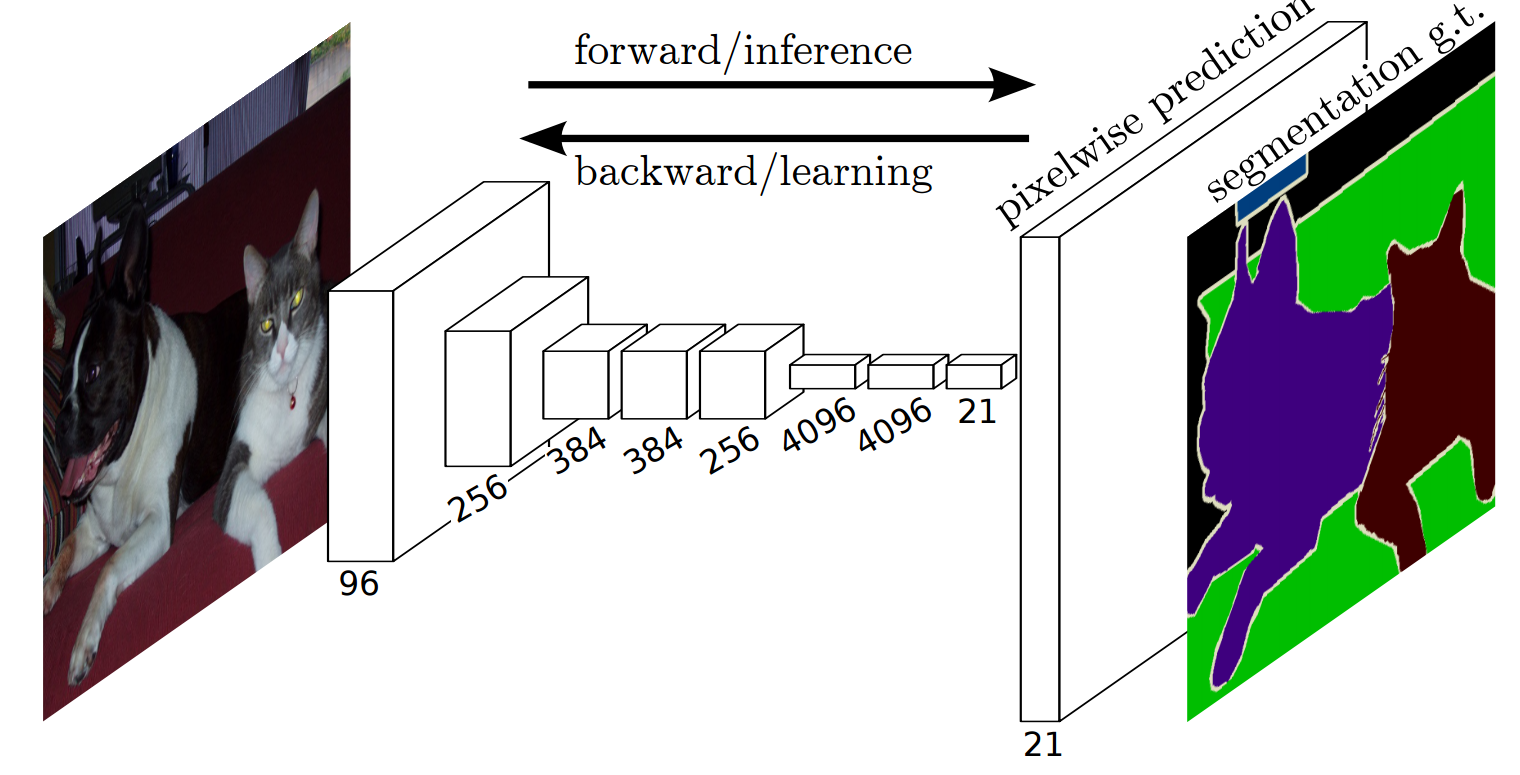
Сегментация¶
Детекция объектов¶
Объектная сегментация¶
Сети¶
Faster-RCNN (resnet50) COCO 2017
FCN (resnet101) COCO 2017
- DeepLab v3 (resnet101) COCO 2017
DeepLab v3 (SqueezeNet 1.1) KITTI
Mask-RCNN (resnet50) COCO 2017
Фреймворки и билиотеки¶
![]()
Потребление ресурсов¶
Точность сегментации (обнаружение машин)¶

IoU для сегментации машин без учета фона¶
Deep Lab (SqueezeNet) mean IOU error: 45.99%
FCN (resnet101) mean IOU error: 46.14%
Deep Lab (resnet101) mean IOU error: 53.23%
Mask RCNN (resnet50, пороги 0.9) mean IoU error: 39.39%
IoU с учетом фона¶
Deep Lab (SqueezeNet) mean IOU error: 0.66%
FCN (resnet101) mean IOU error: 0.47%
Deep Lab (resnet101) mean IOU error: 0.41%
Mask RCNN (resnet50, пороги 0.9) mean IoU error: 0.31%
Когда и что использовать¶
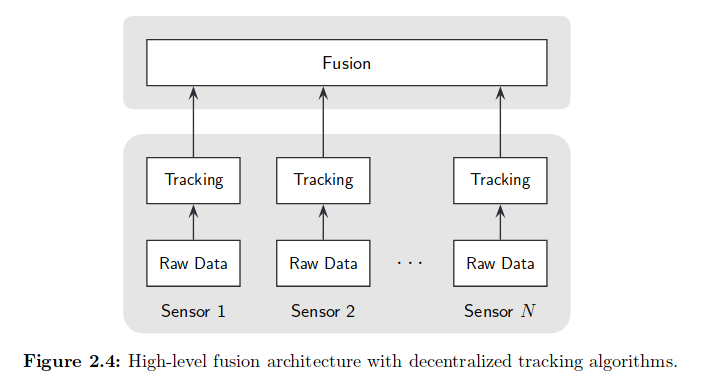
Несколько слов про фьюзинг и трекинг
Комплексирование данных с лидаром¶
LidarToCamera projection¶

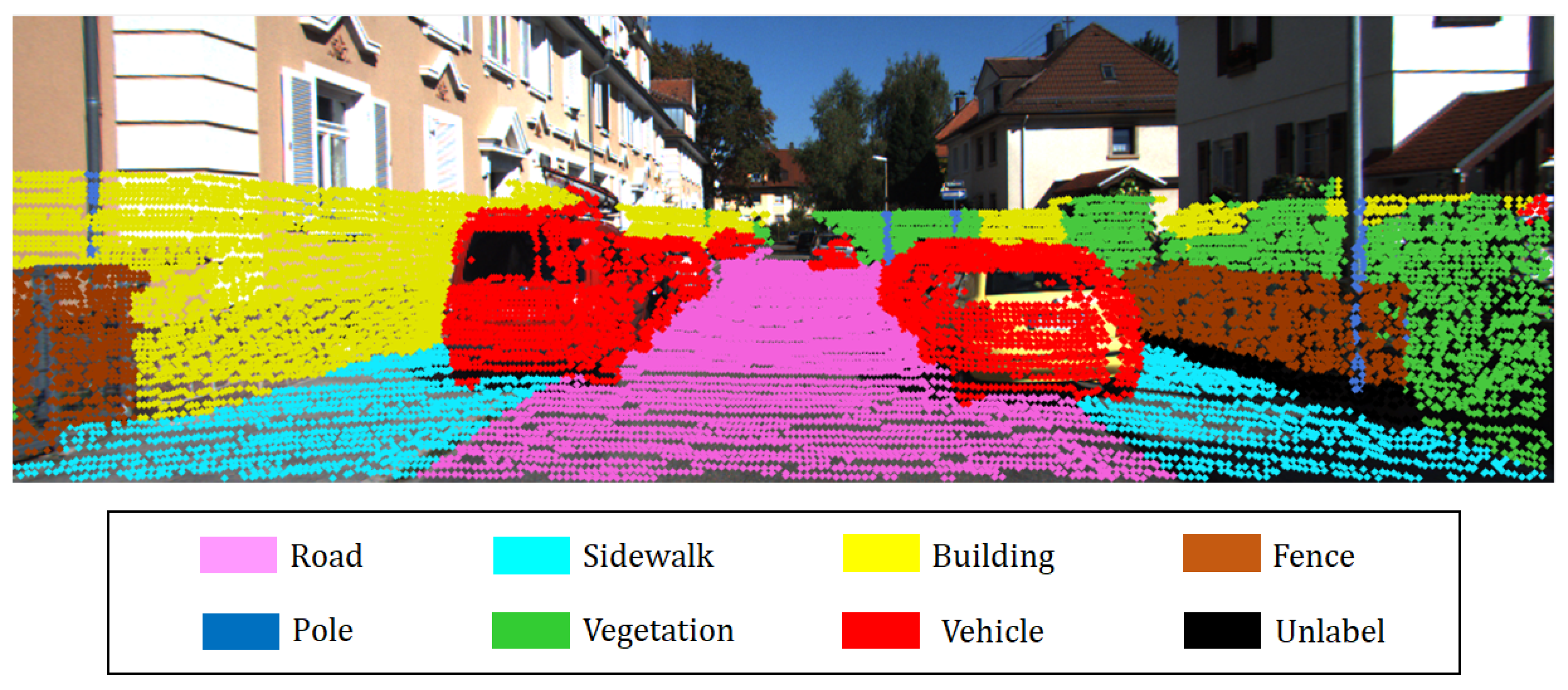
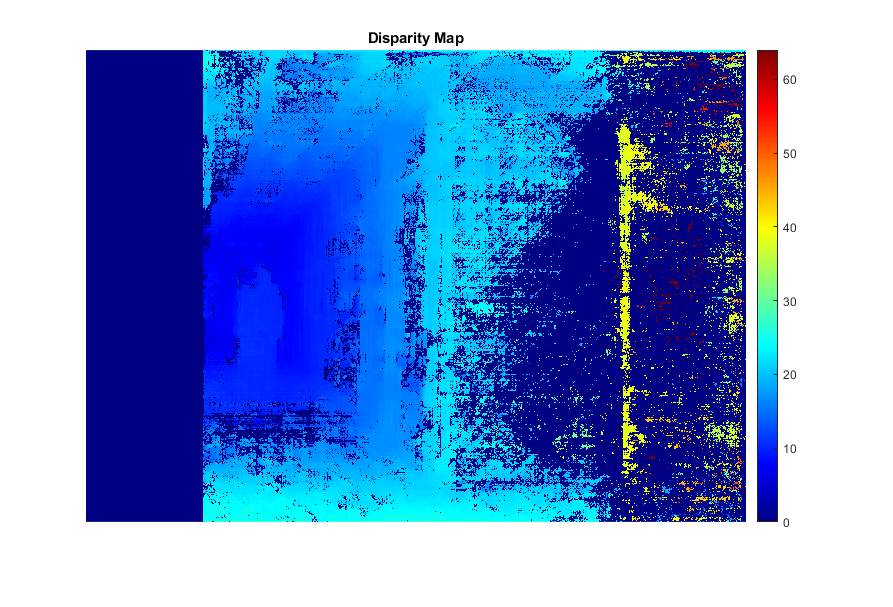
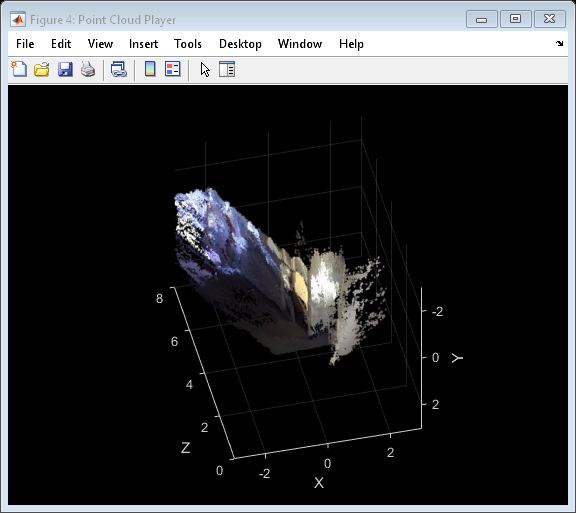
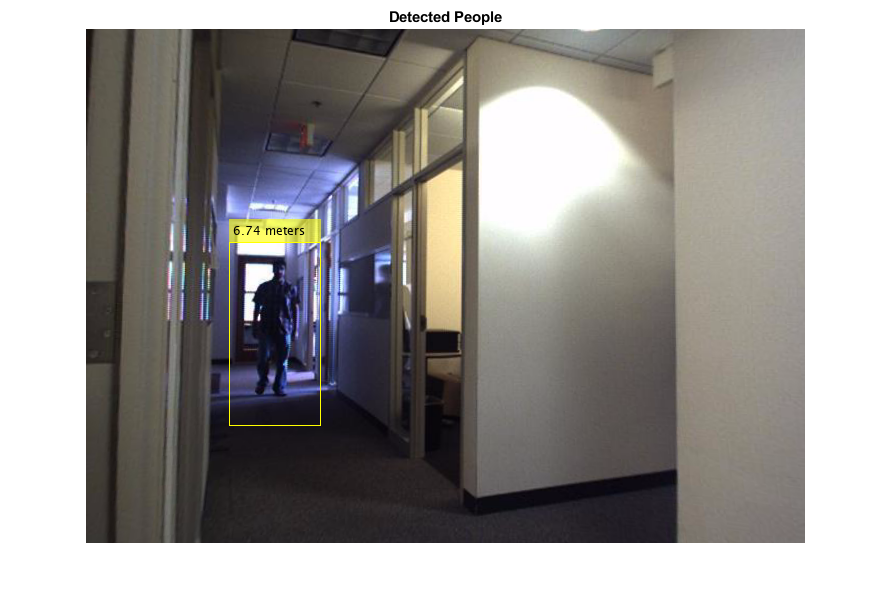
Object detector to stereo fusion¶
Классификацию¶
- Необходимо распознать общий класс окружающий среды для выбора оптимальный претренированных сетей

Детекцию объектов¶
- Необходимо детектировать сам факт присутствия объекта (дор. знаки)
- Искомый объект всегда подходит под прямоугольную форму (можно комплексировать)
- Точность комплексирования не важна
- Нужен трекинг объекта

Сегментацию¶
- Необходимо использовать sensor fusion с датчиками, дающими информацию о 3D пространстве
- Необходимо находить объекты большой площади на кадре
- Разделение на сущности не важно

Объектную сегментацию¶
- Необходимо получать данные с высокой достоверностью
- Искомые объекты можно разделить на сущности
- Позволяют аппаратные ресурсы
- Нужен трекинг объекта
